TL;DR
All 3D parts are now printed and fit properly. The Jetson housing properly fits and all the camera mounts fit as expected. The button press enables us to switch between the rear view and side view cameras.
What's New
All the parts we need for assembly are done now! As mentioned before, we had to make some changes to our CAD parts because some fits were a little too tight and also because we added an extra button to our design. COVID also makes handing off parts to group members more inconvenient than we'd like. BUT, we're all done now and the parts look great!
From the images above, we show the Jetson housing, the rear view camera mount, and the side mirror camera mount respectively. (We've removed the mirror from the side mirror to install the mount).
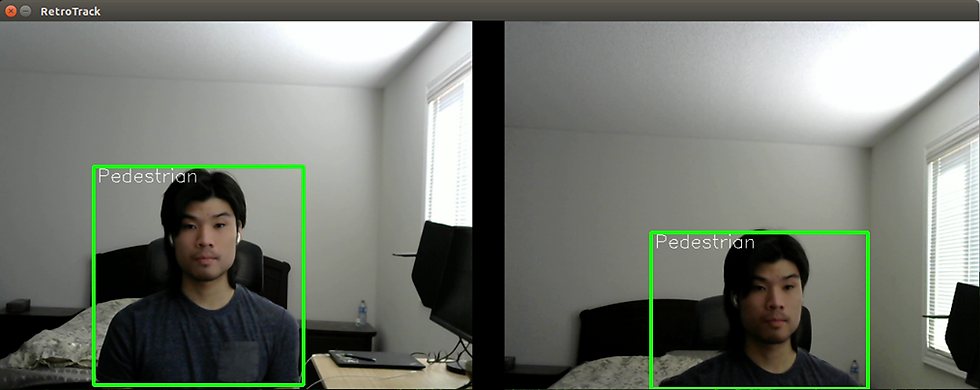
During all of this, we've been running tests on the software side of our project and are in the process of setting up a real-life test setting. We plan to get some real-life footage to test the machine learning detection before hooking it up to the vehicle.
What's Next
Software testing. Lots of software testing. Safety is priority here and we need to make sure our code is robust and works well. We'll be trying to test the software in real-life scenarios and optimizing as we need to.